In this post and the next, we will discuss Cannon-Thurston maps: (continuous) extensions of inclusions  of hyperbolic groups to the boundaries
of hyperbolic groups to the boundaries  . It is not evident that such maps should exist when
. It is not evident that such maps should exist when  is distorted in
is distorted in  , but they often do nonetheless. This post will focus on defining the boundary of a hyperbolic group and establishing basic properties. We’ll take a brief look at Cannon-Thurston‘s first (distorted) example. The next post will discuss the progress of Mitra towards the following open question:
, but they often do nonetheless. This post will focus on defining the boundary of a hyperbolic group and establishing basic properties. We’ll take a brief look at Cannon-Thurston‘s first (distorted) example. The next post will discuss the progress of Mitra towards the following open question:
Question: If are hyperbolic groups, does there exist a Cannon-Thurston map ?
In particular, he has answered the question in the affirmative for the case of normal hyperbolic subgroups of hyperbolic groups and vertex subgroups of finite hyperbolic graphs of hyperbolic groups with quasi-isometric edge inclusion maps.
1. The boundary of a Gromov-hyperbolic space
In this section,  is a geodesic space that is proper and hyperbolic. We’ll see several equivalent definitions for
is a geodesic space that is proper and hyperbolic. We’ll see several equivalent definitions for  and the closure
and the closure  . References include the textbooks of Bridson-Haefliger and Ghys-de la Harpe (in French) and Kapovich-Benakli’s survey paper Boundaries of Hyperbolic Groups.
. References include the textbooks of Bridson-Haefliger and Ghys-de la Harpe (in French) and Kapovich-Benakli’s survey paper Boundaries of Hyperbolic Groups.
Here are two examples to keep in mind. Morally, the boundary of the hyperbolic plane should be the circle at infinity in the Poincare disk model. The boundary of the Cayley graph  for
for  should be a Cantor set, which can be viewed (under the “obvious” embedding of the Cantor set in the plane – see picture below) as the set of limit points of not in itself. Note: the Cantor set is totally disconnected, so the set of ends is the same as the boundary.
should be a Cantor set, which can be viewed (under the “obvious” embedding of the Cantor set in the plane – see picture below) as the set of limit points of not in itself. Note: the Cantor set is totally disconnected, so the set of ends is the same as the boundary.

Geodesic rays will be parametrized by arclength.
- Fix a basepoint
 . Then
. Then  is the set of equivalence classes of geodesic rays
is the set of equivalence classes of geodesic rays  originating at
originating at  (i.e.,
(i.e.,  ). Ray
). Ray  is equivalent to
is equivalent to  , written
, written  , if
, if  , or equivalently if the images of and are a finite Hausdorff distance from each other. [Note: for CAT(0) spaces, each equivalence class contains a single ray since the metric is convex.]
, or equivalently if the images of and are a finite Hausdorff distance from each other. [Note: for CAT(0) spaces, each equivalence class contains a single ray since the metric is convex.]
- is defined the same way, but without requiring that rays originate at .
-
 is the set of equivalence classes of quasigeodesic rays (originating at any point in the space). Here we must use only the finite Hausdorff distance as the equivalence relation. [Note: this definition has no analogue for CAT(0) spaces, where there is no quasigeodesic stability.]
is the set of equivalence classes of quasigeodesic rays (originating at any point in the space). Here we must use only the finite Hausdorff distance as the equivalence relation. [Note: this definition has no analogue for CAT(0) spaces, where there is no quasigeodesic stability.]
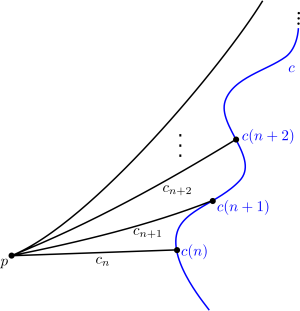
These three sets are in natural bijection: As equivalence classes in (1) are contained in equivalence classes in (2) which are contained in equivalence classes in (3), we need only check that each quasigeodesic equivalence class contains a geodesic ray starting at . This follows from the Arzelà–Ascoli theorem and quasigeodesic stability. (Take a sequence  of generalized geodesic rays representing the points
of generalized geodesic rays representing the points  , i.e. geodesic segments connecting the basepoint to with domain extended to
, i.e. geodesic segments connecting the basepoint to with domain extended to ![{[0,\infty]}](https://s0.wp.com/latex.php?latex=%7B%5B0%2C%5Cinfty%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) by the constant map at
by the constant map at  So
So  A subsequence converges to a geodesic ray from which is Hausdorff-close to
A subsequence converges to a geodesic ray from which is Hausdorff-close to  . See the illustration below.)
. See the illustration below.)
To topologize these boundaries, it suffices to topologize . We do this by defining convergence:  as
as  for
for  if they are represented by generalized rays (geodesic rays allowed)
if they are represented by generalized rays (geodesic rays allowed)  from such that every subsequence of
from such that every subsequence of  has itself a subsequence converging to pointwise and uniformly on compact sets. It is necessary to take subsequences here because we want the sequence of blue points below with red basepoint to converge (to a single point on the boundary):
has itself a subsequence converging to pointwise and uniformly on compact sets. It is necessary to take subsequences here because we want the sequence of blue points below with red basepoint to converge (to a single point on the boundary):

Closed sets are defined to be the sets containing all their limit points. For any fixed  , a fundamental system of open sets in
, a fundamental system of open sets in  about
about  is the collection of
is the collection of  , where a generalized ray
, where a generalized ray  if
if  . (The choice of
. (The choice of  does not matter since asymptotic rays from a fixed basepoint in a hyperbolic space are uniformly close: within
does not matter since asymptotic rays from a fixed basepoint in a hyperbolic space are uniformly close: within  of each other.)
of each other.)
- This difficulty requiring us to take subsequences does not arise in defining the boundary of CAT(0) spaces, since the metric is convex. If is both hyperbolic and CAT(0), the various defined above are homeomorphic to the inverse limit of the closed balls
 as
as  varies, induced by the projection maps to these complete convex subsets. The topology is the inverse limit topology (the coarsest topology making all the maps
varies, induced by the projection maps to these complete convex subsets. The topology is the inverse limit topology (the coarsest topology making all the maps  continuous).
continuous).
- Let
 denote the set of continuous functions from to
denote the set of continuous functions from to  with the compact-open topology. Identify with a subset of
with the compact-open topology. Identify with a subset of  , where
, where  if
if  is a constant map, by associating to
is a constant map, by associating to  the equivalence class of the distance to
the equivalence class of the distance to  function:
function:  . The point of
. The point of  associated to a geodesic ray
associated to a geodesic ray  is represented by the Busemann function
is represented by the Busemann function  defined as
defined as
![\displaystyle b_c(x)=\limsup_{t\rightarrow\infty}{\left[d(x,c(t))-t\right]}.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+b_c%28x%29%3D%5Climsup_%7Bt%5Crightarrow%5Cinfty%7D%7B%5Cleft%5Bd%28x%2Cc%28t%29%29-t%5Cright%5D%7D.&bg=ffffff&fg=000000&s=0&c=20201002)
The level sets of Busemann fuctions are called horospheres, agreeing in  with the classical horospheres. A Busemann function can be viewed as a sort of “distance” function to a point of , but with close points having very small distance: near
with the classical horospheres. A Busemann function can be viewed as a sort of “distance” function to a point of , but with close points having very small distance: near  instead of near 0.
instead of near 0.
- Points of the sequential boundary
 are represented by sequences in that converge to a point in . To describe this convergence, we’ll need to use the Gromov product for points
are represented by sequences in that converge to a point in . To describe this convergence, we’ll need to use the Gromov product for points  :
:
![\displaystyle (x\cdot y)_z=\frac12\left[d(x,z)+d(y,z)-d(x,y)\right].](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%28x%5Ccdot+y%29_z%3D%5Cfrac12%5Cleft%5Bd%28x%2Cz%29%2Bd%28y%2Cz%29-d%28x%2Cy%29%5Cright%5D.&bg=ffffff&fg=000000&s=0&c=20201002)
In a tree, the Gromov product represents the overlap length of the segments ![{[z,x]}](https://s0.wp.com/latex.php?latex=%7B%5Bz%2Cx%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) and
and ![{[z,y]}](https://s0.wp.com/latex.php?latex=%7B%5Bz%2Cy%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) , or equivalently the distance from
, or equivalently the distance from  to
to ![{[x,y]}](https://s0.wp.com/latex.php?latex=%7B%5Bx%2Cy%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) . In a
. In a  -hyperbolic space, the Gromov product gives a good proxy for
-hyperbolic space, the Gromov product gives a good proxy for ![{d(z,[x,y])}](https://s0.wp.com/latex.php?latex=%7Bd%28z%2C%5Bx%2Cy%5D%29%7D&bg=ffffff&fg=000000&s=0&c=20201002) (to within some fixed multiple of , depending on the definition of -hyperbolicity used.)
(to within some fixed multiple of , depending on the definition of -hyperbolicity used.)
Fix a basepoint . A sequence  is said to converge at infinity if
is said to converge at infinity if  as
as  , and two such sequences
, and two such sequences  converge to the same point if
converge to the same point if  . (Transitivity of this relation follows from one of the many equivalent definitions of -hyperbolicity:
. (Transitivity of this relation follows from one of the many equivalent definitions of -hyperbolicity:  for all
for all  .) A fundamental system of neighborhoods of a boundary point is given by bounding the Gromov overlap from below by a sequence of numbers approaching infinity.
.) A fundamental system of neighborhoods of a boundary point is given by bounding the Gromov overlap from below by a sequence of numbers approaching infinity.
2. Basic Properties
Most of these facts are taken from Bridson-Haefliger, chapter III.H.3.
Fact: is compact. Arzelà–Ascoli gives sequential compactness, and compactness then follows from first countability.
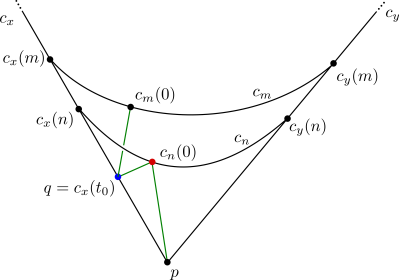
Fact: is visible: for every  ,
,  , there is a geodesic
, there is a geodesic  with
with  ,
,  . Indeed, take geodesic rays
. Indeed, take geodesic rays  originating from a basepoint with
originating from a basepoint with  . Since , there is a point
. Since , there is a point  (shown in blue) a distance more than away from
(shown in blue) a distance more than away from  . For
. For  , we can choose geodesic segments joining
, we can choose geodesic segments joining  to
to  , and extend them to generalized geodesic lines. By -hyperbolicity, some point of the segment is a distance less than from
, and extend them to generalized geodesic lines. By -hyperbolicity, some point of the segment is a distance less than from  , which we can assume is
, which we can assume is  (shown in red). Then Arzelà–Ascoli gives a subsequence of converging to a bi-infinite geodesic . By -hyperbolicity,
(shown in red). Then Arzelà–Ascoli gives a subsequence of converging to a bi-infinite geodesic . By -hyperbolicity,  is within of
is within of  for
for  and within
and within  of for
of for  . (See the diagram below.) So and .
. (See the diagram below.) So and .
Given a map  between hyperbolic spaces, there is at most one way to extend it continuously to the boundary
between hyperbolic spaces, there is at most one way to extend it continuously to the boundary  .
.
Fact: If is a quasi-isometric embedding of geodesic, proper, hyperbolic spaces then  is a (continuous) embedding, where
is a (continuous) embedding, where  (using the quasigeodesic model
(using the quasigeodesic model  of hyperbolic boundary.) If
of hyperbolic boundary.) If  is a quasi-isometry, then is a homeomorphism. (These statements follow immediately from quasigeodesic stability and the description of a fundamental base of neighborhoods above.)
is a quasi-isometry, then is a homeomorphism. (These statements follow immediately from quasigeodesic stability and the description of a fundamental base of neighborhoods above.)
Example:  , so is not quasi-isometric to
, so is not quasi-isometric to  unless
unless  .
.
Since the hyperbolic boundary is a quasi-isometry invariant, we can associate a boundary  to a hyperbolic group .
to a hyperbolic group .
Example: If  is a closed hyperbolic surface and
is a closed hyperbolic surface and  a closed hyperbolic 3-manifold, then
a closed hyperbolic 3-manifold, then  and
and  .
.
Example:  is a Cantor set.
is a Cantor set.
By the above fact, the inclusion map from an undistorted hyperbolic subgroup of a hyperbolic group extends to a continuous map (in fact, an embedding) . When is an arbitrary hyperbolic subgroup of a hyperbolic group , a continuous (not necessarily injective) extension of the inclusion to is called a Cannon-Thurston map.
3. Cannon and Thurston’s Example
Thurston proved that the mapping torus ![{M=(S\times[0,1])/((x,0)\sim(\phi(x),1))}](https://s0.wp.com/latex.php?latex=%7BM%3D%28S%5Ctimes%5B0%2C1%5D%29%2F%28%28x%2C0%29%5Csim%28%5Cphi%28x%29%2C1%29%29%7D&bg=ffffff&fg=000000&s=0&c=20201002) of a hyperbolic surface by a surface automorphism
of a hyperbolic surface by a surface automorphism  is a hyperbolic 3-manifold if and only if is pseudo-Anosov. In particular, there exist hyperbolic 3-manifolds where
is a hyperbolic 3-manifold if and only if is pseudo-Anosov. In particular, there exist hyperbolic 3-manifolds where  is an HNN-extension of a surface group
is an HNN-extension of a surface group  , with
, with

Cannon-Thurston showed the inclusion extends to a surjective map  , a space-filling curve. Therefore is a distorted subgroup of . This was the first example found of a Cannon-Thurston map involving a distorted subgroup. (Mitra’s work, described in the next post, generalizes this result: he shows that there is a Cannon-Thurston map for any hyperbolic normal subgroup of a hyperbolic group.) We will sketch here why the map is surjective.
, a space-filling curve. Therefore is a distorted subgroup of . This was the first example found of a Cannon-Thurston map involving a distorted subgroup. (Mitra’s work, described in the next post, generalizes this result: he shows that there is a Cannon-Thurston map for any hyperbolic normal subgroup of a hyperbolic group.) We will sketch here why the map is surjective.
acts properly by isometries on  via its inclusion in . The image of the Cannon-Thurston map is the limit set
via its inclusion in . The image of the Cannon-Thurston map is the limit set  : the set of accumulation points in
: the set of accumulation points in  of any -orbit in
of any -orbit in  Since is a normal subgroup, elements of act on by permuting these orbits, so they fix . Consequently, they fix the convex hull
Since is a normal subgroup, elements of act on by permuting these orbits, so they fix . Consequently, they fix the convex hull  of in
of in  . Therefore contains a -orbit which is quasi-isometric to itself, so the closed set contains the whole boundary . But
. Therefore contains a -orbit which is quasi-isometric to itself, so the closed set contains the whole boundary . But  (The interior of a ball together with some points on its boundary is alway convex, after all.) So
(The interior of a ball together with some points on its boundary is alway convex, after all.) So  .
.
Kapovich and Short give a generalization of this argument to normal subgroups of -hyperbolic groups.


We answered this question in the negative in a paper “Cannon-Thurston maps do not always exist”:
http://journals.cambridge.org/action/displayAbstract?fromPage=online&aid=9005280&fulltextType=RA&fileId=S2050509413000042