The following is largely based on the paper The Tits Alternative for CAT(0) Cubical Complexes by Sageev and Wise.
1.1. The Tits alternative
A group  satisfies the Tits alternative if for all subgroups
satisfies the Tits alternative if for all subgroups  , either
, either  is virtually solvable or it contains a non-abelian free group. One way to think of this is that a group satisfying the Tits alternative has either “small” subgroups (subgroups and quotients of solvable groups are solvable), or “large” subgroups (extensions by groups containing a free group contain a free group). The term originates from the work of Jacques Tits in which he showed that finitely generated linear groups have this property (later named the Tits alternative).
is virtually solvable or it contains a non-abelian free group. One way to think of this is that a group satisfying the Tits alternative has either “small” subgroups (subgroups and quotients of solvable groups are solvable), or “large” subgroups (extensions by groups containing a free group contain a free group). The term originates from the work of Jacques Tits in which he showed that finitely generated linear groups have this property (later named the Tits alternative).
1.2. Known results
The following groups are known to satisfy the Tits alternative:
- Finitely generated linear groups (Tits)
- hyperbolic groups (Gromov, Ghys and de la Harpe)
-
 (Bestvina-Feighn-Handel)
(Bestvina-Feighn-Handel)
- mapping class groups of compact surfaces (Ivanov, McCarthy)
- some large subclasses of CAT(0) groups (Ballmann-Swiatkowski, Sageev-Wise, Xie)
Thompson’s group F is an example of a group not satisfying the Tits alternative as it contains no free subgroup of rank greater than one and isn’t virtually solvable (Bleak, for instance, constructs non-virtually solvable subgroups). Another is the Grigorchuk group. In fact any group of intermediate growth can’t satisfy the Tits alternative: it can’t have a non-abelian free subgroup (otherwise its growth would in fact be exponential), and by the Milnor–Wolf theorem, if it were virtually solvable, it would have to have a finite index nilpotent subgroup (implying polynomial growth by Gromov’s theorem) or an exponentially growing solvable subgroup (again contradicting intermediate growth).
It’s still an open question whether the Tits alternative holds for all  groups, i.e. for groups which act properly and cocompactly by isometries on some space.
groups, i.e. for groups which act properly and cocompactly by isometries on some space.
1.3. Hyperbolic groups
In case of hyperbolic groups, a stronger version of the Tits alternative holds:
Theorem 1. A subgroup of a hyperbolic group either
- is finite,
- is virtually infinite cyclic, or
- contains a nonabelian free group.
An elementary proof of the above in the case where the subgroup is torsion free is presented on Henry Wilton’s geometric group theory blog (a precursor and inspiration for the blog you’re now reading). The general case requires additional results about hyperbolic elements and is presented (in French) in Sur les groupes hyperboliques d’après Mikhael Gromov (Theorem 37, page 157).
1.4. Groups acting on cube complexes
Theorem 2 (Sageev-Wise). Suppose acts properly on a finite dimensional cube complex  and has a bound on the order of finite subgroups. Then any subgroup of either contains
and has a bound on the order of finite subgroups. Then any subgroup of either contains  or is virtually abelian.
or is virtually abelian.
In particular, if the group acts on such an freely (and thus has no non-trivial finite subgroups), its subgroups contain or are virtually abelian.
I’ll sketch the proof of this theorem following the exposition in the original paper and add a few explanatory details.
We first prove the theorem assuming that is finitely generated.
Since is assumed to be finite dimensional, we proceed, as you may have already guessed, by induction on the dimension. If the dimension is 0, then the group must be finite (since the action is proper), so we’re done. Now we assume the theorem holds for acting on all such cube complexes of dimension less than  . Assume
. Assume  . To apply the induction step, we will identify a proper action of a subgroup of on a lower dimensional subcomplex of . This subcomplex will be a “hyperplane” (defined next) and the subgroup acting will be its stabilizer.
. To apply the induction step, we will identify a proper action of a subgroup of on a lower dimensional subcomplex of . This subcomplex will be a “hyperplane” (defined next) and the subgroup acting will be its stabilizer.
A cube complex is a cubical cell complex which is simply connected and in which every link is flag. Two edges of are square equivalent if they are opposite edges of a square of . Let  be an -cube (identified with the standard unit cube in
be an -cube (identified with the standard unit cube in  ). A midcube of is an intersection of with an hyperplane parallel to a face of and containing its center. For instance, there is only one midcube in an edge, two midcubes in a square, etc.
). A midcube of is an intersection of with an hyperplane parallel to a face of and containing its center. For instance, there is only one midcube in an edge, two midcubes in a square, etc.
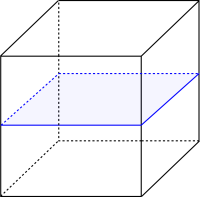
A hyperplane in is the union of all midcubes meeting the equivalence class of an edge (under the equivalence relation generated by square equivalence). A few facts about hyperplanes:
- A hyperplane meets each cube in at most one midcube.
- A hyperplane separates into two components.
- The cube structure on induces a cube structure on any hyperplane in .
1.5. Tangent: ends of groups
Let be any finitely generated group, with  being the set of generators. Then the number of ends of , denoted
being the set of generators. Then the number of ends of , denoted  , is the number of components of the boundary
, is the number of components of the boundary  . It’s a classic fact that the number of ends can only equal 0 (when is finite), 1 (e.g.
. It’s a classic fact that the number of ends can only equal 0 (when is finite), 1 (e.g.  ), 2 (e.g.
), 2 (e.g.  ), or infinity (e.g. ).
), or infinity (e.g. ).
The number of ends of a finitely generated group relative to a subgroup , denoted  , is the number of ends of the graph
, is the number of ends of the graph  , i.e. the quotient of the Cayley graph of by the action of . Equivalently, it is the number of ends of the graph in which vertices are cosets of and vertices
, i.e. the quotient of the Cayley graph of by the action of . Equivalently, it is the number of ends of the graph in which vertices are cosets of and vertices  and
and  are connected if and only if
are connected if and only if  .
.
It is a famous result of Stallings that  if and only if splits as an amalgamated product or an HNN-extension over a finite group. In the language of Bass-Serre theory, we have:
if and only if splits as an amalgamated product or an HNN-extension over a finite group. In the language of Bass-Serre theory, we have:

For relative ends, the picture is more complicated:

The one of the key theorems which embody the ( ) implication above is the Algebraic Torus Theorem (Dunwoody-Swenson), given below. First, however, we must establish the subgroup with respect to which has multiple ends.
) implication above is the Algebraic Torus Theorem (Dunwoody-Swenson), given below. First, however, we must establish the subgroup with respect to which has multiple ends.
Theorem 3 (Sageev). Suppose  , a finite dimensional cube complex, without a global fixed point. Then there is a hyperplane
, a finite dimensional cube complex, without a global fixed point. Then there is a hyperplane  such that
such that  .
.
Theorem 4 (Algebraic Torus). Suppose is finitely generated, and , a subgroup of , is virtually polycyclic with  . Then one of the following holds.
. Then one of the following holds.
- is virtually polycyclic.
- There exists a short exact sequence

in which  is virtually polycyclic and
is virtually polycyclic and  is non-elementary fuchsian (see below).
is non-elementary fuchsian (see below).
- splits over a virtually polycyclic group.
1.6. Tangent: fuchsian groups
A fuchsian group is a subgroup of  . Thus, a fuchsian group acts discretely on the hyperbolic plane
. Thus, a fuchsian group acts discretely on the hyperbolic plane  . Consider the set
. Consider the set  , for some
, for some  . With respect to the hyperbolic metric on , the set has no limit points: either in , since the action is discrete, or in
. With respect to the hyperbolic metric on , the set has no limit points: either in , since the action is discrete, or in  , since every point in is infinitely far from the boundary. However, considering the Euclidean distance inherits by being embedded as the Poincaré disk in
, since every point in is infinitely far from the boundary. However, considering the Euclidean distance inherits by being embedded as the Poincaré disk in  , may have limit points in . Basic hyperbolic geometry implies that:
, may have limit points in . Basic hyperbolic geometry implies that:
- the limit points occur only in ,
- for any other
 , the sets of limit points of
, the sets of limit points of  and are identical, and
and are identical, and
- the cardinality of the set of limit points is 0, 1, 2 or uncountable.
A fuchsian group is non-elementary when the set of limit points is uncountable. Such a group contains .
The non-elementary fuchsian groups are really the only interesting ones: the elementary ones are either finite or virtually cyclic.
Let’s recap the proof so far. We proceed by induction, and assume the theorem true for  . For of dimension , since is infinite and acts properly on , it has no global fixed points. Hence we apply Sageev’s theorem and conclude that there is a hyperplane s.t. . Let
. For of dimension , since is infinite and acts properly on , it has no global fixed points. Hence we apply Sageev’s theorem and conclude that there is a hyperplane s.t. . Let  . Then acts on
. Then acts on  properly. By induction, either has an subgroup, and then so does so we’re done, or is virtually f.g. abelian. In this case, we apply the Algebraic Torus Theorem to and , and conclude that (1) is virtually polycyclic, or (2) it has a non-elementary fuchsian quotient, or (3) it splits over a virtually polycyclic group. We deal with these possibilities one by one.
properly. By induction, either has an subgroup, and then so does so we’re done, or is virtually f.g. abelian. In this case, we apply the Algebraic Torus Theorem to and , and conclude that (1) is virtually polycyclic, or (2) it has a non-elementary fuchsian quotient, or (3) it splits over a virtually polycyclic group. We deal with these possibilities one by one.
If is virtually polycyclic, then we can apply the following two results of Bridson to conclude that it’s in fact virtually abelian.
Lemma 5.
- If , a complex with finitely many shapes, then acts semi-simply with a discrete set of translation lengths.
- If acts semi-simply and properly on a space, then any virtually solvable subgroup is virtually abelian.
(The number of shapes of a metric cell complex is the number distinct isometry classes of cells. In our case, has finitely many shapes since every cube of a given dimension is isometric and is has finite dimension. An action is semi-simple if there are points in the space realizing the translation lengths of each element. I.e., if for every  there’s a point realizing
there’s a point realizing  ).
).
If has a non-elementary fuchsian quotient, which must contain an , then itself must contain an .
Finally, suppose splits over a virtually polycyclic group . Then by the first part of Bridson’s lemma above, acts semi-simply, and by the second part, must be virtually abelian. We analyze amalgamated products and HNN-extensions separately.
Suppose  . If
. If ![{[A:P] > 2}](https://s0.wp.com/latex.php?latex=%7B%5BA%3AP%5D+%3E+2%7D&bg=ffffff&fg=000000&s=0&c=20201002) or
or ![{[B:P]>2}](https://s0.wp.com/latex.php?latex=%7B%5BB%3AP%5D%3E2%7D&bg=ffffff&fg=000000&s=0&c=20201002) , then contains an , by the normal form theorem for amalgamated products. If
, then contains an , by the normal form theorem for amalgamated products. If ![{[A:P] = [B:P] = 2}](https://s0.wp.com/latex.php?latex=%7B%5BA%3AP%5D+%3D+%5BB%3AP%5D+%3D+2%7D&bg=ffffff&fg=000000&s=0&c=20201002) , then the Bass-Serre tree, on which acts, is homeomorphic to a line in which every edge is stabilized by a conjugate of . Thus there’s an index 2 subgroup
, then the Bass-Serre tree, on which acts, is homeomorphic to a line in which every edge is stabilized by a conjugate of . Thus there’s an index 2 subgroup  acting by translations and
acting by translations and  . Hence
. Hence  , and so is virtually polycyclic and hence virtually abelian by Bridson’s lemma. This takes care of the amalgamated product case. To analyze an HNN-extension by , as well as to prove this theorem for non-finitely generated , another theorem is required.
, and so is virtually polycyclic and hence virtually abelian by Bridson’s lemma. This takes care of the amalgamated product case. To analyze an HNN-extension by , as well as to prove this theorem for non-finitely generated , another theorem is required.
Theorem 6 (Bridson-Haefliger). Suppose by semi-simple isometries and is . Suppose also that
- there’s a bound on the dimension of isometrically embedded flats,
- the set of translation lengths of is discrete at 0, and
- there is a bound on the order of finite subgroups.
Then any ascending sequence of virtually abelian subgroups stabilizes.
Suppose  , with
, with  and
and  being the two injections of into
being the two injections of into  . If
. If ![{[C:i_1(P)] > 1}](https://s0.wp.com/latex.php?latex=%7B%5BC%3Ai_1%28P%29%5D+%3E+1%7D&bg=ffffff&fg=000000&s=0&c=20201002) and
and ![{[C:i_2(P)] > 1}](https://s0.wp.com/latex.php?latex=%7B%5BC%3Ai_2%28P%29%5D+%3E+1%7D&bg=ffffff&fg=000000&s=0&c=20201002) , then by the normal form theorem for HNN-extensions, has an subgroup. If
, then by the normal form theorem for HNN-extensions, has an subgroup. If ![{[C:i_1(P)] = 1}](https://s0.wp.com/latex.php?latex=%7B%5BC%3Ai_1%28P%29%5D+%3D+1%7D&bg=ffffff&fg=000000&s=0&c=20201002) , then
, then ![{[C:i_2(P)] = 1}](https://s0.wp.com/latex.php?latex=%7B%5BC%3Ai_2%28P%29%5D+%3D+1%7D&bg=ffffff&fg=000000&s=0&c=20201002) . [Otherwise, if
. [Otherwise, if  , consider the following subgroups of :
, consider the following subgroups of :

By the Bridson-Haefliger theorem above, this sequence must stabilize, hence  .] Then
.] Then  , and by Bridson’s lemma, is virtually abelian.
, and by Bridson’s lemma, is virtually abelian.
This finishes the proof for finitely generated . If is not finitely generated, it contains an ascending, non-stabilizing sequence of finitely generated subgroups

If any  contains an , we’re done. If not, then by the theorem applied to finitely generated groups, each is virtually abelian. Then conditions of the Bridson-Haefliger theorem above are satisfied, however, so a non-stabilizing ascending sequence is impossible. Hence if is not finitely generated, it contains an .
contains an , we’re done. If not, then by the theorem applied to finitely generated groups, each is virtually abelian. Then conditions of the Bridson-Haefliger theorem above are satisfied, however, so a non-stabilizing ascending sequence is impossible. Hence if is not finitely generated, it contains an .


 to a continuous
to a continuous  is called a Cannon-Thurston map. By the continuity of
is called a Cannon-Thurston map. By the continuity of  , if such a map exists it’s unique.
, if such a map exists it’s unique. , where
, where  is a hyperbolic closed 3-manifold fibering over a circle, and
is a hyperbolic closed 3-manifold fibering over a circle, and  , where
, where  is an infinite hyperbolic normal subgroup of a hyperbolic group
is an infinite hyperbolic normal subgroup of a hyperbolic group  . Then there exists a Cannon-Thurston map
. Then there exists a Cannon-Thurston map  be a finite graph of groups where all vertex groups
be a finite graph of groups where all vertex groups  and edge groups
and edge groups  are hyperbolic, and all injections
are hyperbolic, and all injections  (where
(where  is incident to
is incident to  ) are quasi-isometric embeddings. Suppose that
) are quasi-isometric embeddings. Suppose that  is also hyperbolic. Then for any vertex
is also hyperbolic. Then for any vertex  , there is a Cannon-Thurston map
, there is a Cannon-Thurston map  .
.
 be a proper embedding of proper hyperbolic spaces. Suppose, given
be a proper embedding of proper hyperbolic spaces. Suppose, given  , that there is a non-negative function
, that there is a non-negative function  such that
such that  as
as  and for all geodesic segments
and for all geodesic segments  outside an
outside an  -ball around
-ball around  is outside the
is outside the  (see the illustration below). Then there’s a Cannon-Thurston map
(see the illustration below). Then there’s a Cannon-Thurston map  .
. 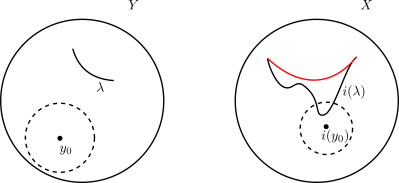
 does not extend continuously, there exist sequences
does not extend continuously, there exist sequences  in
in  such that
such that  and
and  for some
for some  , but
, but  and
and  for
for  in
in  .
.![{d_Y(y_0, [x_m,y_m]) \rightarrow \infty}](https://s0.wp.com/latex.php?latex=%7Bd_Y%28y_0%2C+%5Bx_m%2Cy_m%5D%29+%5Crightarrow+%5Cinfty%7D&bg=ffffff&fg=000000&s=0&c=20201002) as
as  . On the other hand, for
. On the other hand, for  large enough,
large enough, ![{d_X(i(y_0), [i(x_m),i(y_m)])}](https://s0.wp.com/latex.php?latex=%7Bd_X%28i%28y_0%29%2C+%5Bi%28x_m%29%2Ci%28y_m%29%5D%29%7D&bg=ffffff&fg=000000&s=0&c=20201002) stays uniformly close to
stays uniformly close to ![{d_X(i(y_0),[u,v]) > 0}](https://s0.wp.com/latex.php?latex=%7Bd_X%28i%28y_0%29%2C%5Bu%2Cv%5D%29+%3E+0%7D&bg=ffffff&fg=000000&s=0&c=20201002) (see the discussion of visibility in the
(see the discussion of visibility in the 
 of hyperbolic metric spaces is a metric space
of hyperbolic metric spaces is a metric space  admitting a map
admitting a map  onto a simplicial tree
onto a simplicial tree  satisfying
satisfying  ,
,  is path connected, rectifiable, and
is path connected, rectifiable, and  -hyperbolic. We denote the induced path metric by
-hyperbolic. We denote the induced path metric by  .
.
 are uniformly proper. That is, there exists a function
are uniformly proper. That is, there exists a function  such that for all
such that for all  , if
, if  , then
, then  .
.
 ,
,  is path connected and rectifiable. The induced path metric is denoted
is path connected and rectifiable. The induced path metric is denoted  .
.
![{f_e: X_e \times [0,1] \rightarrow X}](https://s0.wp.com/latex.php?latex=%7Bf_e%3A+X_e+%5Ctimes+%5B0%2C1%5D+%5Crightarrow+X%7D&bg=ffffff&fg=000000&s=0&c=20201002) such that
such that  is an isometry onto
is an isometry onto  .
.
 and
and  are
are  -quasi-isometric embeddings into
-quasi-isometric embeddings into  and
and  , where
, where  and
and  .
.
 such that for any
such that for any  , then
, then  , and
, and  as
as  .
. . In order to shortcut an
. In order to shortcut an  -geodesic from
-geodesic from  to
to  , we can’t use a path that travels to more than
, we can’t use a path that travels to more than  other vertex spaces
other vertex spaces  , since the distance between such subspaces is at least 1. The length of a path in
, since the distance between such subspaces is at least 1. The length of a path in  which goes to infinity like
which goes to infinity like  as
as  increases.]
increases.]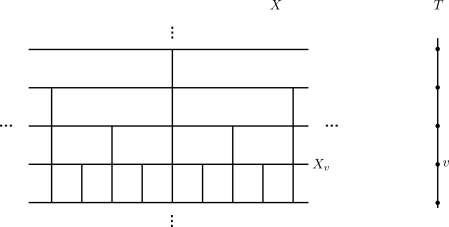
 is glued to the upper vertex subspace by an isometry and to the lower vertex subspace by a
is glued to the upper vertex subspace by an isometry and to the lower vertex subspace by a  -quasi-isometry stretching the metric by a factor of 2.
-quasi-isometry stretching the metric by a factor of 2. be a tree of hyperbolic metric spaces. If
be a tree of hyperbolic metric spaces. If  in
in  is constructed containing
is constructed containing  , then
, then  is outside an
is outside an  . Applying the key lemma above finishes the proof.
. Applying the key lemma above finishes the proof. intersecting
intersecting  is distance 1 away from
is distance 1 away from 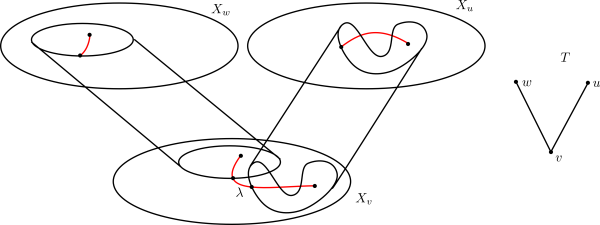
 when
when  with
with  , consider its universal cover
, consider its universal cover  (with the corresponding vertex and edge group assignments, so that
(with the corresponding vertex and edge group assignments, so that  ; see below for an example).
; see below for an example). 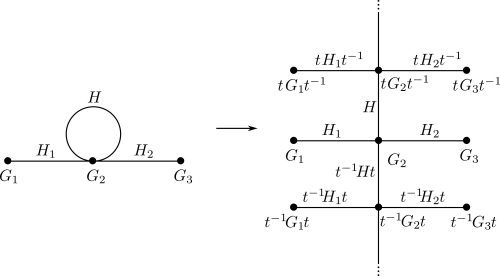
![\times [0,1]](https://s0.wp.com/latex.php?latex=%5Ctimes+%5B0%2C1%5D&bg=ffffff&fg=000000&s=0&c=20201002) and the corresponding quasi-isometric embeddings, we get a tree of hyperbolic spaces satisfying the hypotheses of Mitra’s theorem.
and the corresponding quasi-isometric embeddings, we get a tree of hyperbolic spaces satisfying the hypotheses of Mitra’s theorem. of hyperbolic groups to the boundaries
of hyperbolic groups to the boundaries  . It is not evident that such maps should exist when
. It is not evident that such maps should exist when  . References include the textbooks of
. References include the textbooks of 
 . Then
. Then  is the set of equivalence classes of geodesic rays
is the set of equivalence classes of geodesic rays  originating at
originating at  (i.e.,
(i.e.,  ). Ray
). Ray  is equivalent to
is equivalent to  , written
, written  , if
, if  , or equivalently if the images of
, or equivalently if the images of  is the set of equivalence classes of quasigeodesic rays (originating at any point in the space). Here we must use only the finite Hausdorff distance as the equivalence relation. [Note: this definition has no analogue for CAT(0) spaces, where there is no quasigeodesic stability.]
is the set of equivalence classes of quasigeodesic rays (originating at any point in the space). Here we must use only the finite Hausdorff distance as the equivalence relation. [Note: this definition has no analogue for CAT(0) spaces, where there is no quasigeodesic stability.]
 of generalized geodesic rays representing the points
of generalized geodesic rays representing the points  , i.e. geodesic segments connecting the basepoint
, i.e. geodesic segments connecting the basepoint ![{[0,\infty]}](https://s0.wp.com/latex.php?latex=%7B%5B0%2C%5Cinfty%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) by the constant map at
by the constant map at  So
So  A subsequence converges to a geodesic ray from
A subsequence converges to a geodesic ray from  . See the illustration below.)
. See the illustration below.)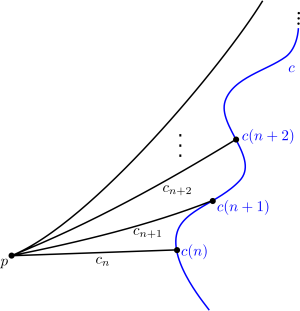
 as
as  for
for  if they are represented by generalized rays (geodesic rays allowed)
if they are represented by generalized rays (geodesic rays allowed)  from
from  has itself a subsequence converging to
has itself a subsequence converging to 
 , a fundamental system of open sets in
, a fundamental system of open sets in  about
about  is the collection of
is the collection of  , where a generalized ray
, where a generalized ray  if
if  . (The choice of
. (The choice of  does not matter since asymptotic rays from a fixed basepoint in a hyperbolic space are uniformly close: within
does not matter since asymptotic rays from a fixed basepoint in a hyperbolic space are uniformly close: within  of each other.)
of each other.) as
as  continuous).
continuous).
 denote the set of continuous functions from
denote the set of continuous functions from  with the
with the  , where
, where  if
if  is a constant map, by associating to
is a constant map, by associating to  the equivalence class of the distance to
the equivalence class of the distance to  . The point of
. The point of  associated to a geodesic ray
associated to a geodesic ray  is represented by the Busemann function
is represented by the Busemann function  defined as
defined as
![\displaystyle b_c(x)=\limsup_{t\rightarrow\infty}{\left[d(x,c(t))-t\right]}.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+b_c%28x%29%3D%5Climsup_%7Bt%5Crightarrow%5Cinfty%7D%7B%5Cleft%5Bd%28x%2Cc%28t%29%29-t%5Cright%5D%7D.&bg=ffffff&fg=000000&s=0&c=20201002)
 with the classical
with the classical  instead of near 0.
instead of near 0.  are represented by sequences in
are represented by sequences in  :
:
![\displaystyle (x\cdot y)_z=\frac12\left[d(x,z)+d(y,z)-d(x,y)\right].](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%28x%5Ccdot+y%29_z%3D%5Cfrac12%5Cleft%5Bd%28x%2Cz%29%2Bd%28y%2Cz%29-d%28x%2Cy%29%5Cright%5D.&bg=ffffff&fg=000000&s=0&c=20201002)
![{[z,x]}](https://s0.wp.com/latex.php?latex=%7B%5Bz%2Cx%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) and
and ![{[z,y]}](https://s0.wp.com/latex.php?latex=%7B%5Bz%2Cy%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) , or equivalently the distance from
, or equivalently the distance from  to
to ![{[x,y]}](https://s0.wp.com/latex.php?latex=%7B%5Bx%2Cy%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) . In a
. In a ![{d(z,[x,y])}](https://s0.wp.com/latex.php?latex=%7Bd%28z%2C%5Bx%2Cy%5D%29%7D&bg=ffffff&fg=000000&s=0&c=20201002) (to within some fixed multiple of
(to within some fixed multiple of  is said to converge at infinity if
is said to converge at infinity if  as
as  , and two such sequences
, and two such sequences  converge to the same point if
converge to the same point if  . (Transitivity of this relation follows from one of the many equivalent definitions of
. (Transitivity of this relation follows from one of the many equivalent definitions of  for all
for all  .) A fundamental system of neighborhoods of a boundary point is given by bounding the Gromov overlap from below by a sequence of numbers approaching infinity.
.) A fundamental system of neighborhoods of a boundary point is given by bounding the Gromov overlap from below by a sequence of numbers approaching infinity.  ,
,  , there is a geodesic
, there is a geodesic  with
with  ,
,  . Indeed, take geodesic rays
. Indeed, take geodesic rays  originating from a basepoint
originating from a basepoint  . Since
. Since  (shown in blue) a distance more than
(shown in blue) a distance more than  . For
. For  , we can choose geodesic segments
, we can choose geodesic segments  to
to  , and extend them to generalized geodesic lines. By
, and extend them to generalized geodesic lines. By  , which we can assume is
, which we can assume is  (shown in red). Then Arzelà–Ascoli gives a subsequence of
(shown in red). Then Arzelà–Ascoli gives a subsequence of  is within
is within  for
for  and within
and within  of
of  . (See the diagram below.) So
. (See the diagram below.) So 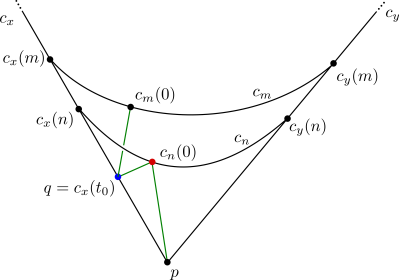
 between hyperbolic spaces, there is at most one way to extend it continuously to the boundary
between hyperbolic spaces, there is at most one way to extend it continuously to the boundary  .
. is a (continuous) embedding, where
is a (continuous) embedding, where  (using the quasigeodesic model
(using the quasigeodesic model  of hyperbolic boundary.) If
of hyperbolic boundary.) If  is a quasi-isometry, then
is a quasi-isometry, then  , so
, so  unless
unless  .
. to a hyperbolic group
to a hyperbolic group  and
and  .
.  is a Cantor set.
is a Cantor set.![{M=(S\times[0,1])/((x,0)\sim(\phi(x),1))}](https://s0.wp.com/latex.php?latex=%7BM%3D%28S%5Ctimes%5B0%2C1%5D%29%2F%28%28x%2C0%29%5Csim%28%5Cphi%28x%29%2C1%29%29%7D&bg=ffffff&fg=000000&s=0&c=20201002) of a hyperbolic surface
of a hyperbolic surface  is a hyperbolic 3-manifold if and only if
is a hyperbolic 3-manifold if and only if  is an HNN-extension of a surface group
is an HNN-extension of a surface group  , with
, with 
 , a space-filling curve. Therefore
, a space-filling curve. Therefore  via its inclusion in
via its inclusion in  : the set of accumulation points in
: the set of accumulation points in  of any
of any  Since
Since  of
of  . Therefore
. Therefore  (The interior of a ball together with some points on its boundary is alway convex, after all.) So
(The interior of a ball together with some points on its boundary is alway convex, after all.) So  .
. . A projective resolution of a
. A projective resolution of a  is an exact sequence
is an exact sequence 
 is a projective
is a projective  as a trivial
as a trivial  of a group
of a group  such that
such that 
 have the property that their finitely presented subgroups are also hyperbolic. This result appears in Gersten’s paper
have the property that their finitely presented subgroups are also hyperbolic. This result appears in Gersten’s paper  is a group and
is a group and  is a finitely generated
is a finitely generated  –module. Let
–module. Let  be a finitely generated free
be a finitely generated free  , such that there is a surjective homomorphism
, such that there is a surjective homomorphism  of
of  is a free
is a free  –basis for
–basis for  –norm
–norm  .
. . Such a norm
. Such a norm  on
on  and
and  is obtained from another surjective homomorphism from a different finitely generated free
is obtained from another surjective homomorphism from a different finitely generated free  –module
–module  , then there is a uniform constant
, then there is a uniform constant  such that
such that  for all
for all  . So
. So 
 is free and finitely generated and given an
is free and finitely generated and given an  associated to some basis, and
associated to some basis, and is projective.
is projective. for
for  (that is, a map
(that is, a map  is the identity on
is the identity on  so that
so that  for all
for all  .
. is projective, we know that
is projective, we know that  . We choose a map
. We choose a map  such that
such that  is the identity on
is the identity on  be a finitely generated free submodule generated by a subset of the generators of
be a finitely generated free submodule generated by a subset of the generators of  which contains the image of
which contains the image of  . Let
. Let  . Notice that
. Notice that  is also free, but not necessarily finitely generated. We can modify the retraction
is also free, but not necessarily finitely generated. We can modify the retraction  to
to  and
and  . Let
. Let  be a surjective homomorphism of
be a surjective homomorphism of  such that
such that  . This map
. This map  can be extended to
can be extended to  by setting the images under
by setting the images under  . It follows this
. It follows this  and
and  .
. are both finitely generated and free. So the map
are both finitely generated and free. So the map  for all
for all  . Since the standard norm on
. Since the standard norm on  for all
for all  . This completes the proof.
. This completes the proof. be an arbitrary group and let
be an arbitrary group and let  . Then there exists an
. Then there exists an  -dimensional
-dimensional  -complex
-complex  . If
. If  -complex.
-complex. be a finitely presented group. So
be a finitely presented group. So  , where
, where  and
and  is the normal closure of the relations
is the normal closure of the relations  . Let the presentation
. Let the presentation  –complex of this group be
–complex of this group be  , the abelianization of R , and the
, the abelianization of R , and the  –action on it is induced by the conjugation of
–action on it is induced by the conjugation of  –module structure on
–module structure on  , where
, where  is the
is the  -skeleton of the universal cover of the presentation complex
-skeleton of the universal cover of the presentation complex  –complex
–complex  .
. is an exact sequence of
is an exact sequence of  projective, then
projective, then  is projective.
is projective.
 are projective and
are projective and  is projective.
is projective.
 –modules
–modules  . By definition this means that
. By definition this means that  such that
such that  as
as  free as a
free as a  of
of  and
and  satisfy
satisfy  . Further, by adding trivial letters and corresponding relations to the presentation for
. Further, by adding trivial letters and corresponding relations to the presentation for  . An application of the
. An application of the  is projective as a
is projective as a 
 .
.  for
for  , such that there is a uniform constant
, such that there is a uniform constant  with the property that
with the property that  for all
for all  . So if
. So if  , then
, then  .
.  be a circuit in
be a circuit in  and let
and let  be a
be a  of minimal area. The area of
of minimal area. The area of  , where
, where  is the element of
is the element of  corresponding to
corresponding to  , where now
, where now  is in terms of
is in terms of  as a
as a  satisfies a linear isoperimetric inequality, then so does
satisfies a linear isoperimetric inequality, then so does  . Since
. Since  . Hyperbolic groups are always of type
. Hyperbolic groups are always of type  is a branching locus if it satisfies the following two conditions:
is a branching locus if it satisfies the following two conditions: -cell
-cell  of
of  , we have that
, we have that  is a disjoint union of faces of
is a disjoint union of faces of  .
. is nonempty and connected for each cell
is nonempty and connected for each cell  .
. , the link
, the link  is a full subcomplex of
is a full subcomplex of  .
. is obtained as follows:
is obtained as follows: .
.
 . If
. If  and let
and let  .
.
 , which is an example of a branching locus.
, which is an example of a branching locus. :
: 
 is free of rank
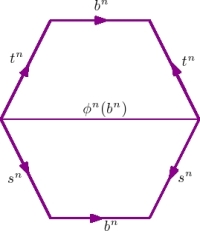
is free of rank  . As a free basis, take the six loops
. As a free basis, take the six loops  . (The bars indicate paths traversed in the opposite direction to their orientations.) Let
. (The bars indicate paths traversed in the opposite direction to their orientations.) Let  be the homomorphism such that
be the homomorphism such that 
 and
and  are the permutations
are the permutations  and
and  , respectively. The essential feature of this construction is that
, respectively. The essential feature of this construction is that  maps all commutators of
maps all commutators of  or
or  with
with  or
or  to non–trivial five–cycles, since
to non–trivial five–cycles, since  .
.  , let
, let  be the projections
be the projections  ,
,  and
and  . All are continuous, onto, and induce homomorphisms
. All are continuous, onto, and induce homomorphisms  .
.  be a retract
be a retract  to
to  . For
. For  .
.  defines a
defines a  -fold covering of
-fold covering of  be the natural map
be the natural map  .
. is hyperbolic
is hyperbolic space. By the following two theorems, to establish that
space. By the following two theorems, to establish that  –hyperbolic metric space. Then
–hyperbolic metric space. Then  is a complete bipartite graph where each component has four vertices (along with some half edges i.e. edges with one end–point missing). Each loop is this graph that consists of four edges maps to the boundary of a neighborhood of a point in
is a complete bipartite graph where each component has four vertices (along with some half edges i.e. edges with one end–point missing). Each loop is this graph that consists of four edges maps to the boundary of a neighborhood of a point in  under exactly one of the maps
under exactly one of the maps  or
or  . Such a loop deformation retracts to one of the commutator loops in
. Such a loop deformation retracts to one of the commutator loops in  . Therefore in the branched cover, the link structure around these vertices is distorted, i.e. the aforementioned loops lift to
. Therefore in the branched cover, the link structure around these vertices is distorted, i.e. the aforementioned loops lift to  –fold copies.
–fold copies. in the universal cover intersecting this plane that is not parallel to it, which maps to an edge in the branching locus. Let the intersection of the flat plane with this edge be
in the universal cover intersecting this plane that is not parallel to it, which maps to an edge in the branching locus. Let the intersection of the flat plane with this edge be  . The link of
. The link of  give rise to a map to the oriented unit circle mapping the edges to the cirlce respecting the orientation. This extends linearly to a map
give rise to a map to the oriented unit circle mapping the edges to the cirlce respecting the orientation. This extends linearly to a map  .
. lifts to a map from the universal cover of
lifts to a map from the universal cover of  . The ascending and descending links of any vertex in this Morse theory setting are
. The ascending and descending links of any vertex in this Morse theory setting are  induced by
induced by  , and in particular not hyperbolic. For further details of such Combinatorial Morse theory, see
, and in particular not hyperbolic. For further details of such Combinatorial Morse theory, see  but not of type
but not of type  be a presentation complex for some presentation of
be a presentation complex for some presentation of  is a loop in
is a loop in  , we define the filling area of
, we define the filling area of 

 , or equivalently if and only if
, or equivalently if and only if  is subquadratic. This result is due to Gromov; the absence of Dehn functions between linear and quadratic is called the “Gromov Gap”.
is subquadratic. This result is due to Gromov; the absence of Dehn functions between linear and quadratic is called the “Gromov Gap”.
 . (On account of the Gromov gap, this means that
. (On account of the Gromov gap, this means that  or
or  .)
.)
 .
. such that
such that  is a short exact sequence,
is a short exact sequence,  .
. and is defined by
and is defined by  . The automorphism
. The automorphism  is given by
is given by  and
and  . Let
. Let  , the free group generated by
, the free group generated by  and
and  . You can see that
. You can see that  by considering the family of words
by considering the family of words  (with length on the order of
(with length on the order of 

 letters, and it is clearly reduced in
letters, and it is clearly reduced in  , where
, where  . The corresponding presentation complex built out of squares can be shown to satisfy the link condition.
. The corresponding presentation complex built out of squares can be shown to satisfy the link condition. of
of  .
.  . Alternatively, see
. Alternatively, see  , for a proof see Theorem 6.20 in
, for a proof see Theorem 6.20 in  . Now consider the following family of embedded disks in
. Now consider the following family of embedded disks in  :
:
 . Moreover, the boundary loops of these disks do not admit fillings with smaller area, since
. Moreover, the boundary loops of these disks do not admit fillings with smaller area, since  -dimensional and aspherical. (In such spaces the embedded filling is the most efficient among the fillings of any loop.) This shows that
-dimensional and aspherical. (In such spaces the embedded filling is the most efficient among the fillings of any loop.) This shows that  is a lower bound on the Dehn function.
is a lower bound on the Dehn function.  embeds in
embeds in  . Since
. Since  . Then the subgroup
. Then the subgroup  of
of  . (It is easy to see that the relations
. (It is easy to see that the relations  and
and  , and the corresponding relations involving
, and the corresponding relations involving  and
and  in Step 1, one can construct other examples.
in Step 1, one can construct other examples. , where
, where  is a CAT(0) group, and
is a CAT(0) group, and  . (The example above is the case n=2.) Then the double
. (The example above is the case n=2.) Then the double  embeds in
embeds in  , and
, and  . Thus,
. Thus,  occurs as the Dehn function of a subgroup of a CAT(0) group for all integers
occurs as the Dehn function of a subgroup of a CAT(0) group for all integers  .
.  be a hyperbolic surface bundle over a circle. Then one has a short exact sequence
be a hyperbolic surface bundle over a circle. Then one has a short exact sequence  , and
, and  is a CAT(0) group. Bridson and Haefliger prove that if
is a CAT(0) group. Bridson and Haefliger prove that if  . Hence,
. Hence,  and
and  . In fact it is
. In fact it is  . Thus,
. Thus,  occurs as the Dehn function of a subgroup of a CAT(0) groups.
occurs as the Dehn function of a subgroup of a CAT(0) groups. to use in Step 1, for example due to
to use in Step 1, for example due to  for
for  or functions growing faster than
or functions growing faster than  .
.
 . The lower bound was proved in a manner similar to the example above, by constructing a sequence of embedded diagrams in the level set for
. The lower bound was proved in a manner similar to the example above, by constructing a sequence of embedded diagrams in the level set for  .
.
 , where
, where  is not an integer, but
is not an integer, but  has Dehn function
has Dehn function  .
.  . Using these in Step 1 of the Bieri doubling trick, they produce a class of examples of subgroups of CAT(0) groups with Dehn functions of the form
. Using these in Step 1 of the Bieri doubling trick, they produce a class of examples of subgroups of CAT(0) groups with Dehn functions of the form  is an integer. The kernels are of type
is an integer. The kernels are of type  , unlike the original Bieri doubles, which all have finite
, unlike the original Bieri doubles, which all have finite  ‘s. Another interesting direction is to study higher dimensional Dehn functions of CAT(0) groups and their subgroups. We won’t go into the technicalities here, but just say that the
‘s. Another interesting direction is to study higher dimensional Dehn functions of CAT(0) groups and their subgroups. We won’t go into the technicalities here, but just say that the  measures the difficulty of filling
measures the difficulty of filling  -chains (or
-chains (or  . (As in the case
. (As in the case  , the group
, the group  attains this general upper bound.)
attains this general upper bound.) 
 such that there is no algorithm to decide membership of
such that there is no algorithm to decide membership of  has a solvable conjugacy problem (
has a solvable conjugacy problem (
 where
where 
 is finitely presented and
is finitely presented and  , and so questions about equality in
, and so questions about equality in 
 ),
), 
 , can be identified with to a finite presentation
, can be identified with to a finite presentation  of
of  is finitely generated as a
is finitely generated as a  is finite. This can be seen by taking the attaching maps of the 3-cells as the generators of the module. This identification allows one to find a nice presentation for
is finite. This can be seen by taking the attaching maps of the 3-cells as the generators of the module. This identification allows one to find a nice presentation for  be a presentation for a group
be a presentation for a group  be a sequence of words of the form
be a sequence of words of the form  where
where  and
and  is some word over
is some word over  . We call such a sequence an identity sequence if
. We call such a sequence an identity sequence if  is freely equal to the empty word in
is freely equal to the empty word in  . An equivalence relation is given on identity sequences, and we consider the action of
. An equivalence relation is given on identity sequences, and we consider the action of  . This action naturally induces a
. This action naturally induces a  . Thus
. Thus  , a compact, negatively curved, piecewise hyperbolic 2-dimensional complex
, a compact, negatively curved, piecewise hyperbolic 2-dimensional complex 
 ,
,
 ,
,
 of cardinality at least 2,
of cardinality at least 2,
 is represented by one of the 1-cells of
is represented by one of the 1-cells of  follows from the next result.
follows from the next result. such that
such that  and unsolvable word problem. The enhanced Rips construction is applied to to
and unsolvable word problem. The enhanced Rips construction is applied to to  , where
, where  where
where  and the
and the  are lifts of generators of
are lifts of generators of  for a generating set for
for a generating set for  is in
is in  be finitely generated groups. Suppose
be finitely generated groups. Suppose  and there exists
and there exists  such that
such that  . If there is no algorithm to decide membership of
. If there is no algorithm to decide membership of  where
where  , as item (9) of Theorem 3 tells us that the centralizer of
, as item (9) of Theorem 3 tells us that the centralizer of  is
is  , and thereby gives us unsolvability of the conjugacy problem.
, and thereby gives us unsolvability of the conjugacy problem. and
and  is the fundamental group of a compact non=-positively curved squared complex, and is thus biautomatic (
is the fundamental group of a compact non=-positively curved squared complex, and is thus biautomatic ( such that there is no algorithm to determine whether or not
such that there is no algorithm to determine whether or not  is isomorphic to
is isomorphic to  .
.  where
where  is an HNN-extension of
is an HNN-extension of  where
where  generates a maximal cyclic subgroup.
generates a maximal cyclic subgroup. ,
,  ,…. Hercules fights a hydra by striking off its first letter. The hydra then regenerates as follows: each remaining letter
,…. Hercules fights a hydra by striking off its first letter. The hydra then regenerates as follows: each remaining letter  , where
, where  , becomes
, becomes  and the
and the  .
. 
 in five strikes:
in five strikes: 
 to be the number of strikes it takes Hercules to vanquish the hydra
to be the number of strikes it takes Hercules to vanquish the hydra  ,
,  , define
, define  . For example,
. For example,  and
and  (another fun exercise).
(another fun exercise).  , defined for integers
, defined for integers  by:
by:  and
and  . So, in particular,
. So, in particular,  ,
,  and
and  , the
, the  is essentially a version of Ackermann’s function:
is essentially a version of Ackermann’s function:  .
. is a hydra (
is a hydra ( ). Then in the time
). Then in the time  it takes to kill
it takes to kill  (and many other letters besides) after the final
(and many other letters besides) after the final  . Disposing of those letters then represents an additional challenge for Hercules. So the time it takes to complete that initial task of killing
. Disposing of those letters then represents an additional challenge for Hercules. So the time it takes to complete that initial task of killing 


 ,
,
 is a rank–
is a rank– .
.![{[a_1,t]=1}](https://s0.wp.com/latex.php?latex=%7B%5Ba_1%2Ct%5D%3D1%7D&bg=ffffff&fg=000000&s=0&c=20201002) and
and ![{a_{i-1} = [a_i,t]}](https://s0.wp.com/latex.php?latex=%7Ba_%7Bi-1%7D+%3D+%5Ba_i%2Ct%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) for
for  (convention:
(convention: ![{[a,b]= a^{-1}b^{-1}ab}](https://s0.wp.com/latex.php?latex=%7B%5Ba%2Cb%5D%3D+a%5E%7B-1%7Db%5E%7B-1%7Dab%7D&bg=ffffff&fg=000000&s=0&c=20201002) ) and then eliminating
) and then eliminating  and defining
and defining  , one can present
, one can present ![\displaystyle G_k \ \cong \ \langle \ a, t \ \mid \ [a, \underbrace{t, \ldots, t}_k ] =1 \ \rangle.](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+G_k+%5C+%5Ccong+%5C+%5Clangle+%5C+a%2C+t+%5C+%5Cmid+%5C+%5Ba%2C+%5Cunderbrace%7Bt%2C+%5Cldots%2C+t%7D_k+%5D+%3D1+%5C+%5Crangle.&bg=ffffff&fg=000000&s=0&c=20201002)
 where
where  is the “Engel” word defined recursively by
is the “Engel” word defined recursively by  and
and ![{v_{i+1} = [v_i,t]}](https://s0.wp.com/latex.php?latex=%7Bv_%7Bi%2B1%7D+%3D+%5Bv_i%2Ct%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) for
for  .
. and
and  for
for  for every
for every  in
in  , the words
, the words  and
and  become freely equal for all
become freely equal for all  . So the relation
. So the relation  to give an alternative one–relator presentation for
to give an alternative one–relator presentation for 
 for
for  as
as 
 that represents the identity. So when the
that represents the identity. So when the  ‘s are carried through the word and collected at the end (using the defining relations of
‘s are carried through the word and collected at the end (using the defining relations of  is
is  ?
?
 and
and  . One can try to convert
. One can try to convert  to a word on
to a word on  and
and  times a power of
times a power of  to pair the first letter with
to pair the first letter with  to the end of the word by conjugating through the intervening letters; then pair off the next
to the end of the word by conjugating through the intervening letters; then pair off the next 

 .
.

 denote the reduced word on
denote the reduced word on  which represents
which represents  . The diagram pictured above can be paired with its mirror image, separated by three corridors of 2–cells as shown below, to give a diagram that demonstrates the equality in
. The diagram pictured above can be paired with its mirror image, separated by three corridors of 2–cells as shown below, to give a diagram that demonstrates the equality in  (the word along the bottom of the diagram) to a word of length
(the word along the bottom of the diagram) to a word of length  . Thus the distortion is at least
. Thus the distortion is at least  .
. 
![{\langle G_k, p \mid [p, a_it]=1 \ (\forall i) \rangle}](https://s0.wp.com/latex.php?latex=%7B%5Clangle+G_k%2C+p+%5Cmid+%5Bp%2C+a_it%5D%3D1+%5C+%28%5Cforall+i%29++%5Crangle%7D&bg=ffffff&fg=000000&s=0&c=20201002)
 .
. with a free rank–
with a free rank– subgroup
subgroup  whose distortion is
whose distortion is  .
. 

 are some words on the
are some words on the  which we won’t specify explicitly here. So comparing with
which we won’t specify explicitly here. So comparing with  and the seventeen
and the seventeen  that is present in
that is present in  is an automorphism.
is an automorphism. 
 but the
but the  . [The number of
. [The number of  is
is  and
and  do not depend on
do not depend on 
 and
and  . All the other defining relations are encoded in the graphs: an edge labelled
. All the other defining relations are encoded in the graphs: an edge labelled  . I won’t explain here why these presentations both give
. I won’t explain here why these presentations both give  –valued Morse function all of whose ascending and descending links are trees, then its fundamental group is free–by–cyclic. (See, for example,
–valued Morse function all of whose ascending and descending links are trees, then its fundamental group is free–by–cyclic. (See, for example,  , the four green edges have length
, the four green edges have length  , and all other edges have length
, and all other edges have length  .]
.]
 , and then checking that no cells have all their corners giving rise to edges in the list.
, and then checking that no cells have all their corners giving rise to edges in the list. of a finitely generated subgroup
of a finitely generated subgroup 
 and
and  denote word metrics associated to some choices of finite generating sets. Those choices are not important: different choices lead to
denote word metrics associated to some choices of finite generating sets. Those choices are not important: different choices lead to  –equivalent distortion functions.
–equivalent distortion functions.  (in the sense of
(in the sense of  and this leads to the Dehn functions being at least as fast growing as the distortion functions: if a short word
and this leads to the Dehn functions being at least as fast growing as the distortion functions: if a short word  in this
in this  , then
, then ![{[a,w]}](https://s0.wp.com/latex.php?latex=%7B%5Ba%2Cw%5D%7D&bg=ffffff&fg=000000&s=0&c=20201002) represents the identity and has area at least
represents the identity and has area at least 

 when it conjugates
when it conjugates  , graphically displays this calculation.
, graphically displays this calculation. 
 . Then the distortion of
. Then the distortion of 
 . [We will write
. [We will write  for the
for the 

 . [We will not go into details of the upper bounds, it suffices to say they do not harbour any great subtleties.] Here is an illustration of the calculation that leads to the 3–fold iterated exponential distortion:
. [We will not go into details of the upper bounds, it suffices to say they do not harbour any great subtleties.] Here is an illustration of the calculation that leads to the 3–fold iterated exponential distortion:

 , we can re–express this presentation as:
, we can re–express this presentation as: 
 and so the distortion grows like
and so the distortion grows like  .
. 

 and
and  . This is an exponentially growing automorphism — that is,
. This is an exponentially growing automorphism — that is,  has length
has length  when re–expressed as a minimal length word in
when re–expressed as a minimal length word in 

 is a Euclidean square and those corresponding to
is a Euclidean square and those corresponding to  and
and  are Euclidean equilateral triangles, all of side–length
are Euclidean equilateral triangles, all of side–length 
 takes
takes  to a conjugate of itself or its inverse. It follows that
to a conjugate of itself or its inverse. It follows that  has a
has a  –subgroup and so is not hyperbolic.] The existence of hyperbolic free–by–cyclic and, more generally, free–by–free examples can be derived from
–subgroup and so is not hyperbolic.] The existence of hyperbolic free–by–cyclic and, more generally, free–by–free examples can be derived from  or, faster, like
or, faster, like  . These examples combine the techniques we’ve seen above for free–by–cyclic and the iterated Baumslag–Solitar groups. The idea of uniting these ideas to give hyperbolic examples is due to
. These examples combine the techniques we’ve seen above for free–by–cyclic and the iterated Baumslag–Solitar groups. The idea of uniting these ideas to give hyperbolic examples is due to 
 and the
and the  are positive words on
are positive words on  of length
of length  with the property that each two letter–word
with the property that each two letter–word  appears at most once as a subword of the
appears at most once as a subword of the 
 , and in which no
, and in which no  appears twice as a subword. In the same manner as the free–by–cyclic example described earlier they get:
appears twice as a subword. In the same manner as the free–by–cyclic example described earlier they get: is free of rank–
is free of rank– .
. 
 and
and  is always at least
is always at least  . Accordingly, Barnard–Brady–Dani describe the free subgroup generated by the
. Accordingly, Barnard–Brady–Dani describe the free subgroup generated by the  as highly convex — this will be important momentarily.
as highly convex — this will be important momentarily. 
 is a free group of rank
is a free group of rank  which is identified with the exponentially distorted subgroup in
which is identified with the exponentially distorted subgroup in  and the highly convex subgroup in
and the highly convex subgroup in  . So we have exponential–upon–exponential–upon–exponential… distortion leading to
. So we have exponential–upon–exponential–upon–exponential… distortion leading to  being distorted
being distorted  . One can build a presentation 2–complex for a presentation of
. One can build a presentation 2–complex for a presentation of  ,
,  , …,
, …,  , define
, define 
 positive words of length
positive words of length  are
are  subword occurring twice among any of them. Again, find these
subword occurring twice among any of them. Again, find these  and
and  will work).
will work).  .
. 